Ouster激光雷达原生API编程入门
Ouster激光雷达为软件访问和控制传感器提供了一些API,并在此基础上 通过Ouster SDK进行了封装,以便开发者更方便地使用;尽管如此, Ouster在其产品手册或帮助文档中公开了这些API的说明和使用方法, 本文介绍如何在不依赖Ouster SDK的情况下,直接使用底层API访问 和控制雷达,供研究学习或希望绕过SDK直接使用底层API的用户参考。
本文的内容适用于Ouster OS0、OS1和OS2硬件版本号Rev06/Rev07, 固件版本号v2.5.3/v3.0.x/v3.1.x的激光雷达,API操作的代码使用 C编写,测试使用的传感器型号为OS-1-64 Rev 06,固件版本号为v2.5.3。
下载pdf版:https://www.jiawei.site/downloads/pdf/ouster_api_tutorial.pdf
demo源码仓库:https://github.com/dwniaoniao/ouster-lidar-api-demo
1. HTTP API
1.1 简介
Ouster激光雷达启动后运行了一个HTTP Server,连接至雷达的主机可以 发起HTTP请求,获取雷达状态或对雷达进行配置,基本的HTTP请求方式 包括GET、POST、PUT和DELETE,具体的API列表,参考固件用户手册。
1.2 API验证
实验使用的激光雷达型号为OS-1-64,固件版本号为v2.5.3,域名为
“ouster”。以下使用curl命令行工具向雷达发起HTTP请求:
1.2.1 GET
获取sensor_info:
curl http://ouster/api/v1/sensor/metadata/sensor_info | jq
返回结果:
{
"prod_pn": "840-103575-06",
"build_date": "2024-01-11T06:02:47Z",
"status": "STANDBY",
"prod_sn": "122220003521",
"prod_line": "OS-1-64-BH",
"build_rev": "v2.5.3",
"image_rev": "ousteros-image-prod-aries-v2.5.3+20240111055903",
"initialization_id": 7109744
}
1.2.2 POST
POST方法可用于配置雷达:
curl -X POST http://ouster/api/v1/sensor/config -H 'Content-Type: application/json' --data-raw '{"lidar_mode": "1024x10"}'
验证配置结果,可以使用:
curl http://ouster/api/v1/sensor/config
1.2.3 PUT
实验使用的激光雷达具有用户数据域(user data field)用于写入用户数据:
curl -X PUT http://ouster/api/v1/user/data -H 'Content-Type: application/json' -d '"my own data"'
验证结果:
curl http://ouster/api/v1/user/data
返回"my own data"。
1.2.4 DELETE
用户数据域的内容可以擦除:
curl -X DELETE http://ouster/api/v1/user/data
验证结果:
curl http://ouster/api/v1/user/data
返回""。
1.3 通过libcurl使用HTTP API
libcurl是一个功能强大、跨平台的开源网络传输库,支持多种常见的网络协议, 包括HTTP。此处使用C和libcurl提供的C API编程实现使用HTTP API相关的操作。
1.3.1 curl client初始化和释放
使用libcurl的easy interface之前,先获取一个easy handle:
CURL *os_init_curl_client()
{
curl_global_init(CURL_GLOBAL_DEFAULT);
return curl_easy_init();
}
使用libcurl结束后,调用以下的函数执行释放:
void os_deinit_curl_client(CURL *curl)
{
curl_easy_cleanup(curl);
curl_global_cleanup();
}
1.3.2 GET
以下这段代码的作用是:发送一个HTTP GET请求,并将服务器响应完整地 存储到内存中,供后续处理:
// 用于保存服务器返回的响应数据
struct memory{
char *response; // 指向动态分配的内存,用来存放返回的内容
size_t size; // 记录当前已存储的字节数
};
// 回调函数, 当libcurl收到数据时会调用该函数
static size_t write_callback(void *buffer, size_t size, size_t nmemb, void *userp)
{
// 计算数据大小
size_t realsize = size * nmemb;
struct memory *mem = (struct memory *)userp;
// 扩展内存
char *p = realloc(mem->response, mem->size + realsize + 1);
if(!p) return 0;
// 将新数据追加到已有的response中
mem->response = p;
memcpy(&(mem->response[mem->size]), buffer, realsize);
mem->size += realsize;
// 在最后加上字符串结束符'\0',保证内容可作为C字符串使用
mem->response[mem->size] = '\0';
return realsize;
}
CURLcode os_curl_get(CURL *curl, char *url, struct memory *mem)
{
curl_easy_reset(curl);
// 设置请求的URL
curl_easy_setopt(curl, CURLOPT_URL, url);
// 设置写回调函数和用户数据,以便接收服务器响应
curl_easy_setopt(curl, CURLOPT_WRITEFUNCTION, write_callback);
curl_easy_setopt(curl, CURLOPT_WRITEDATA, (void *)mem);
// 设置请求方式为 HTTP GET
curl_easy_setopt(curl, CURLOPT_HTTPGET, 1L);
// 执行请求,并返回结果
return curl_easy_perform(curl);
}
1.3.3 POST
以下函数通过libcurl向指定的URL发送一个带有JSON数据的
HTTP POST请求,常用于配置Ouster激光雷达或向其发送控制命令:
CURLcode os_curl_post(CURL *curl, char *url, char *str)
{
curl_easy_reset(curl);
// 设置目标URL
curl_easy_setopt(curl, CURLOPT_URL, url);
// 添加HTTP请求头, 指定请求体为JSON格式
struct curl_slist *headers = NULL;
headers = curl_slist_append(headers, "Content-Type: application/json");
curl_easy_setopt(curl, CURLOPT_HTTPHEADER, headers);
curl_easy_setopt(curl, CURLOPT_POSTFIELDS, str);
CURLcode res;
// 执行POST请求
res = curl_easy_perform(curl);
// 释放之前创建的请求头链表
curl_slist_free_all(headers);
return res;
}
1.3.4 PUT
以下函数实现了HTTP PUT请求,与前面的POST实现很相似,只是 把请求方法改成了PUT:
CURLcode os_curl_put(CURL *curl, char *url, char *str)
{
curl_easy_reset(curl);
curl_easy_setopt(curl, CURLOPT_URL, url);
struct curl_slist *headers = NULL;
headers = curl_slist_append(headers, "Content-Type: application/json");
curl_easy_setopt(curl, CURLOPT_HTTPHEADER, headers);
curl_easy_setopt(curl, CURLOPT_CUSTOMREQUEST, "PUT");
curl_easy_setopt(curl, CURLOPT_POSTFIELDS, str);
CURLcode res;
res = curl_easy_perform(curl);
curl_slist_free_all(headers);
return res;
}
1.3.5 DELETE
以下函数向指定URL发送一个HTTP DELETE请求,用于删除或关闭雷达中的某些配置或资源:
CURLcode os_curl_delete(CURL *curl, char *url)
{
curl_easy_reset(curl);
curl_easy_setopt(curl, CURLOPT_URL, url);
curl_easy_setopt(curl, CURLOPT_CUSTOMREQUEST, "DELETE");
CURLcode res;
res = curl_easy_perform(curl);
return res;
}
1.3.6 测试与验证
下面对以上的函数进行简单验证,主要操作是:
- 读取激光雷达配置;
- 修改配置“lidar_mode”为“512x10”;
- 再次读取配置以验证配置修改成功;
- 读取用户数据域内容;
- 用户数据域写入内容为“my own data”;
- 再次读取用户数据域内容以验证写入成功;
- 擦除用户数据域内容并重新读取以验证擦除结果。
// 使用GET方法获取用户数据域的内容
static int get_user_data(CURL *curl)
{
int result;
printf("Getting user data...\n");
char *url = "http://ouster/api/v1/user/data";
struct memory mem = {0};
CURLcode res = os_curl_get(curl, url, &mem);
if(res == CURLE_OK){
printf("%s\n", mem.response);
result = EXIT_SUCCESS;
} else{
perror("Error: get user data failed.");
result = EXIT_FAILURE;
}
free(mem.response);
return result;
}
// 使用PUT方法向用户数据域写入数据
static int set_user_data(CURL *curl, char *str)
{
printf("Setting user data...\n");
char *url = "http://ouster/api/v1/user/data";
CURLcode res = os_curl_put(curl, url, str);
if(res == CURLE_OK){
printf("Set user data success.\n");
return EXIT_SUCCESS;
} else{
perror("Error: set user data failed.");
return EXIT_FAILURE;
}
}
// 使用DELETE方法擦除用户数据域的内容
static int delete_user_data(CURL *curl)
{
printf("Deleting user data...\n");
char *url = "http://ouster/api/v1/user/data";
CURLcode res = os_curl_delete(curl, url);
if(res == CURLE_OK){
printf("Delete user data success.\n");
return EXIT_SUCCESS;
} else{
perror("Error: delete user data failed.");
return EXIT_FAILURE;
}
}
// 使用GET方法获取激光雷达配置
static int get_sensor_config(CURL *curl)
{
int result;
printf("Getting sensor config...\n");
char *url = "http://ouster/api/v1/sensor/config";
struct memory mem = {0};
CURLcode res = os_curl_get(curl, url, &mem);
if(res == CURLE_OK){
printf("%s\n", mem.response);
result = EXIT_SUCCESS;
} else{
perror("Error: get sensor config failed.");
result = EXIT_FAILURE;
}
free(mem.response);
return result;
}
// 使用POST方法修改激光雷达配置
static int set_sensor_config(CURL *curl, char *str)
{
printf("Setting sensor config...\n");
char *url = "http://ouster/api/v1/sensor/config";
CURLcode res = os_curl_post(curl, url, str);
if(res == CURLE_OK){
printf("Set sensor config success.\n");
return EXIT_SUCCESS;
} else{
perror("Error: set sensor config failed.");
return EXIT_FAILURE;
}
}
static int curl_client_test()
{
// curl client初始化,获取一个easy handle
CURL *curl = os_init_curl_client();
if(!curl){
perror("Error: initiate curl client failed.");
return EXIT_FAILURE;
}
do{
if(get_sensor_config(curl) == EXIT_FAILURE) break;
char *config_str = "{\"lidar_mode\" : \"512x10\"}";
if(set_sensor_config(curl, config_str) == EXIT_FAILURE) break;
if(get_sensor_config(curl) == EXIT_FAILURE) break;
if(get_user_data(curl) == EXIT_FAILURE) break;
char *user_data_str = "\"my own data\"";
if(set_user_data(curl, user_data_str) == EXIT_FAILURE) break;
if(get_user_data(curl) == EXIT_FAILURE) break;
if(delete_user_data(curl) == EXIT_FAILURE) break;
if(get_user_data(curl) == EXIT_FAILURE) break;
os_deinit_curl_client(curl);
return EXIT_SUCCESS;
} while(0);
// easy handle使用完成后要执行释放
os_deinit_curl_client(curl);
return EXIT_FAILURE;
}
以上测试程序的执行结果:
Getting sensor config...
{"udp_port_imu": 7503, "nmea_ignore_valid_char": 0, "nmea_baud_rate": "BAUD_9600", "udp_profile_imu": "LEGACY", "sync_pulse_out_angle": 360, "udp_dest": "192.168.1.7", "nmea_leap_seconds": 0, "timestamp_mode": "TIME_FROM_INTERNAL_OSC", "udp_port_lidar": 7502, "lidar_mode": "1024x10", "sync_pulse_out_pulse_width": 10, "phase_lock_offset": 0, "nmea_in_polarity": "ACTIVE_HIGH", "columns_per_packet": 16, "udp_profile_lidar": "RNG15_RFL8_NIR8", "signal_multiplier": 1, "phase_lock_enable": false, "sync_pulse_in_polarity": "ACTIVE_HIGH", "azimuth_window": [0, 360000], "multipurpose_io_mode": "OFF", "sync_pulse_out_frequency": 1, "operating_mode": "STANDBY", "sync_pulse_out_polarity": "ACTIVE_HIGH"}
Setting sensor config...
Set sensor config success.
Getting sensor config...
{"udp_port_imu": 7503, "nmea_ignore_valid_char": 0, "nmea_baud_rate": "BAUD_9600", "udp_profile_imu": "LEGACY", "sync_pulse_out_angle": 360, "udp_dest": "192.168.1.7", "nmea_leap_seconds": 0, "timestamp_mode": "TIME_FROM_INTERNAL_OSC", "udp_port_lidar": 7502, "lidar_mode": "512x10", "sync_pulse_out_pulse_width": 10, "phase_lock_offset": 0, "nmea_in_polarity": "ACTIVE_HIGH", "columns_per_packet": 16, "udp_profile_lidar": "RNG15_RFL8_NIR8", "signal_multiplier": 1, "phase_lock_enable": false, "sync_pulse_in_polarity": "ACTIVE_HIGH", "azimuth_window": [0, 360000], "multipurpose_io_mode": "OFF", "sync_pulse_out_frequency": 1, "operating_mode": "STANDBY", "sync_pulse_out_polarity": "ACTIVE_HIGH"}
Getting user data...
""
Setting user data...
Set user data success.
Getting user data...
"my own data"
Deleting user data...
Delete user data success.
Getting user data...
""
2. UDP API
2.1 简介
Ouster激光雷达在运行过程中会将采集到的点云回波和IMU数据 通过UDP协议实时发送到主机,主机程序只需要使用标准的UDP Socket 接收数据包。本文示例代码中接收雷达的UDP数据包使用Linux C Socket API。
2.2 背景
为了更好地理解下文的代码片段,需要了解Ouster激光雷达的相关知识。 以OS-1-64为例,为了顺利地读取并解析从激光雷达接收到的数据,必须 理解以下内容:
2.2.1 基本结构
64线的激光雷达,激光器和接收器绕垂直方向上的中轴旋转,垂直方向 上同时发出64道光束,在水平方向上旋转一圈采集一定次数后形成扫描 的一帧数据;每道光束具有在垂直方向上的俯仰角和水平方向上的旋转 角。注意,并非所有同时发出的光束的出射方向都是相同的。
2.2.2 坐标系
固件用户手册提出了两种坐标系(雷达坐标系和传感器坐标系),此处 仅介绍雷达坐标系,包括下面解析从雷达收到的数据得到点云的xyz坐标也是 以雷达坐标系为参考的,传感器坐标系原理是类似的。
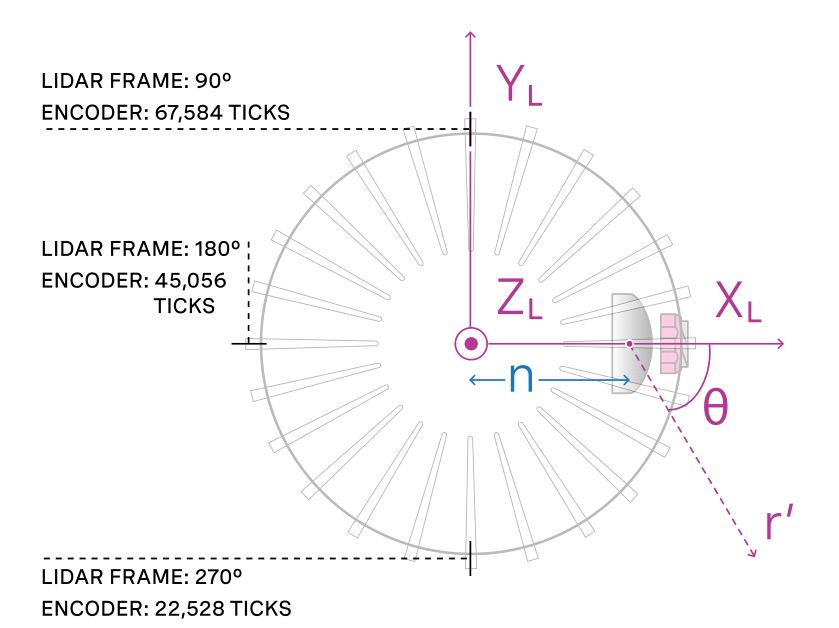
图1:传感器坐标系(俯视)
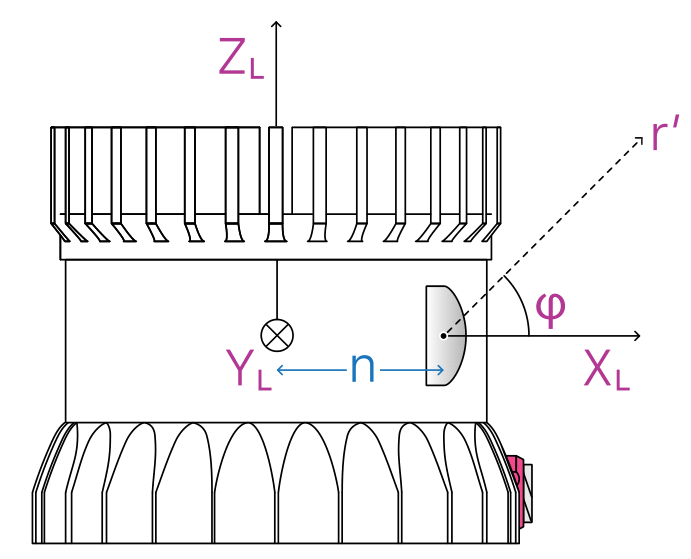
图2:传感器坐标系(侧视)
如图1和图2所示,雷达坐标系按照右手法则, x轴指向连接头方向(0°),y轴指向90°方向,z轴沿着旋转轴指向雷达顶部。
2.2.3 光束相关参数
- 俯仰角: 光束与xy平面的夹角,记录在
beam_intrinsics的beam_altitude_angles数组中,可以使用HTTP API获取; - 旋转角: 光束与旋转轴和光源所形成平面的夹角,记录在
beam_intrinsics的beam_azimuth_angles数组中。
2.2.4 从距离得到xyz坐标
从回波数据可以得到光源和被探测物体之间的距离,xyz坐标需要计算,固件用户手册 中给出了从距离计算xyz坐标的过程,见图3。
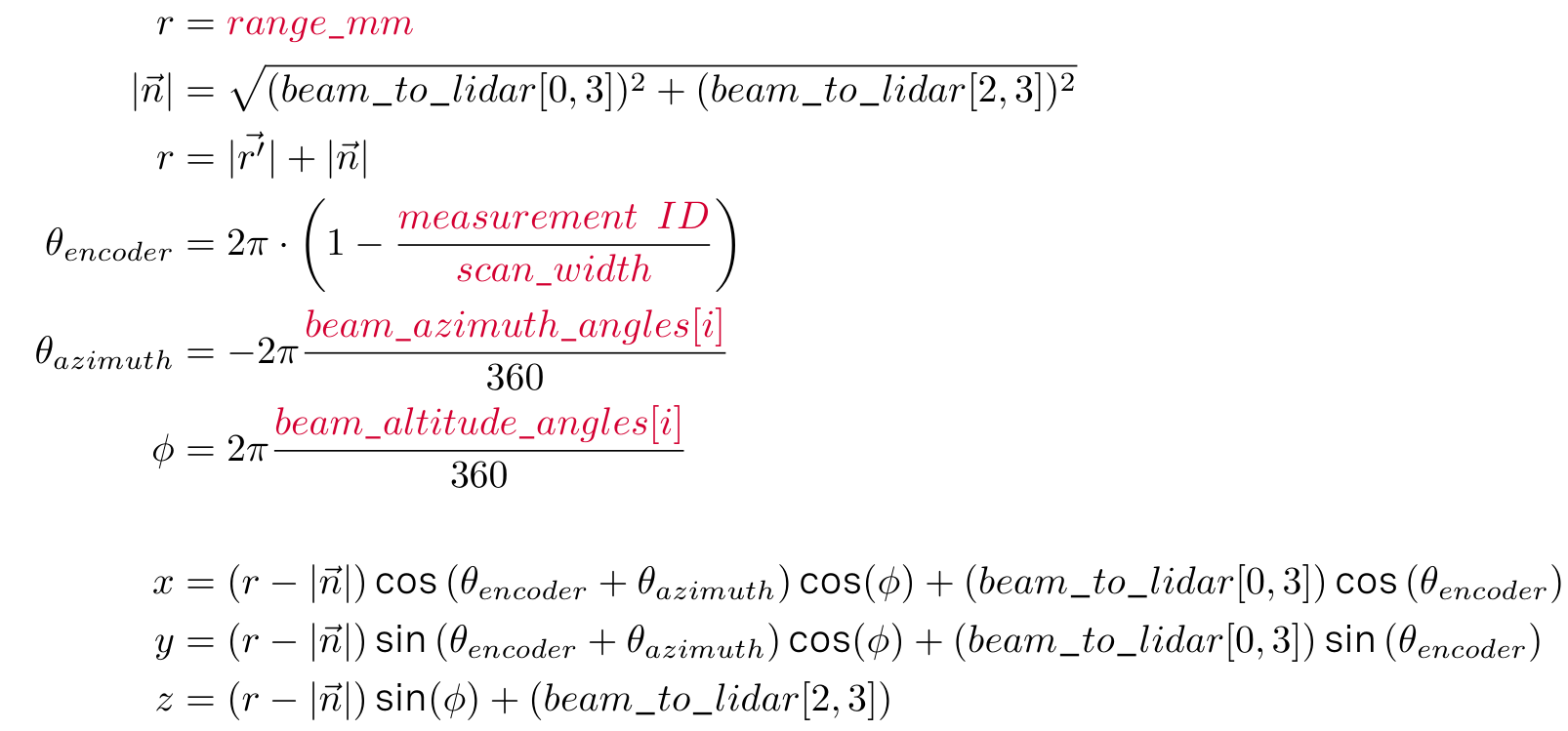
图3:从距离得到xyz坐标的计算过程
计算过程的分析如下:
r'是雷达光源到被探测目标的距离,也可视为从光源到被探测目标的方向向量;n是雷达光源到坐标系原点的距离;r/range_mm是雷达光源到坐标系原点的距离(n)与光源到被探测目标的距离(r')之和;beam_to_lidar是光源处于0°时到坐标系原点的变换矩阵,元素[0, 3]和[2, 3] 分别表示在x和z轴方向上的距离分量;θ(encoder)表示光源绕z轴旋转的角度,使用弧度表示,式中的measurement ID表示 同一帧数据中的本次采集的编号,scan_width表示一帧数据在水平方向上采集的次数;θ(azimuth)是光束的旋转角;φ是光束的俯仰角;- x即为向量
r'在x方向上的长度和光源到坐标系原点的距离在x轴上的投影之和; - y即为向量
r'在y方向上的长度和光源到坐标系原点的距离在y轴上的投影之和; - z即为向量
r'在z方向上的长度和光源到坐标系原点的距离在z轴上的投影之和。
2.2.5 2D图像、交错与解交错
激光雷达扫描的数据具有行和列的结构,垂直方向的光束对应行,水平方向的旋转 步进对应列,因此可以把一帧扫描的结果表示为2D图像。
由于光束具有不同的旋转角,如果把同时发射的光束的回波信号作为2D图像的同一列, 得到的图像在人眼看来是不自然的,行与行之间像素出现交错。图4是 交错的深度图像的例子。
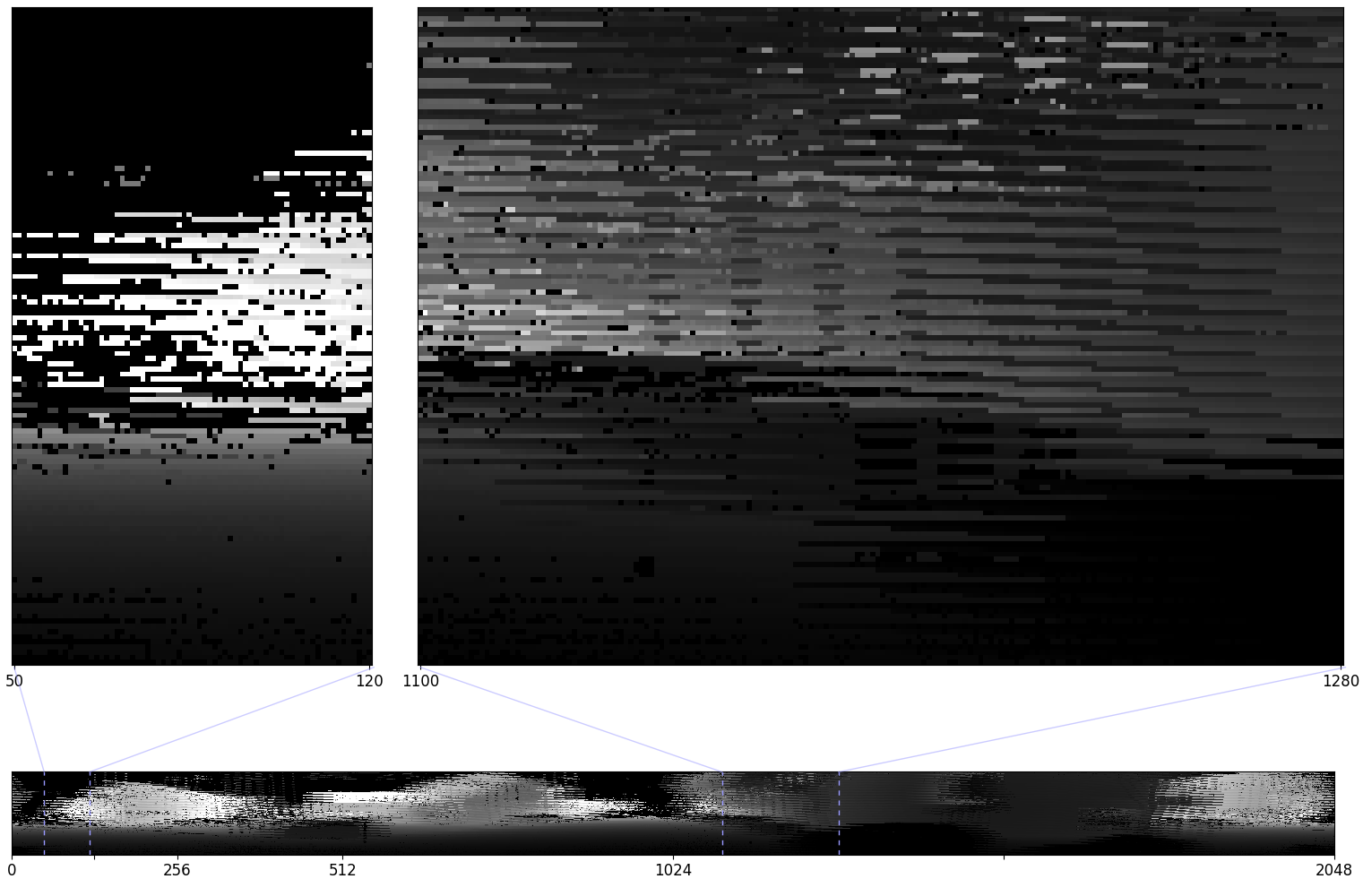
图4:交错的2D深度图像
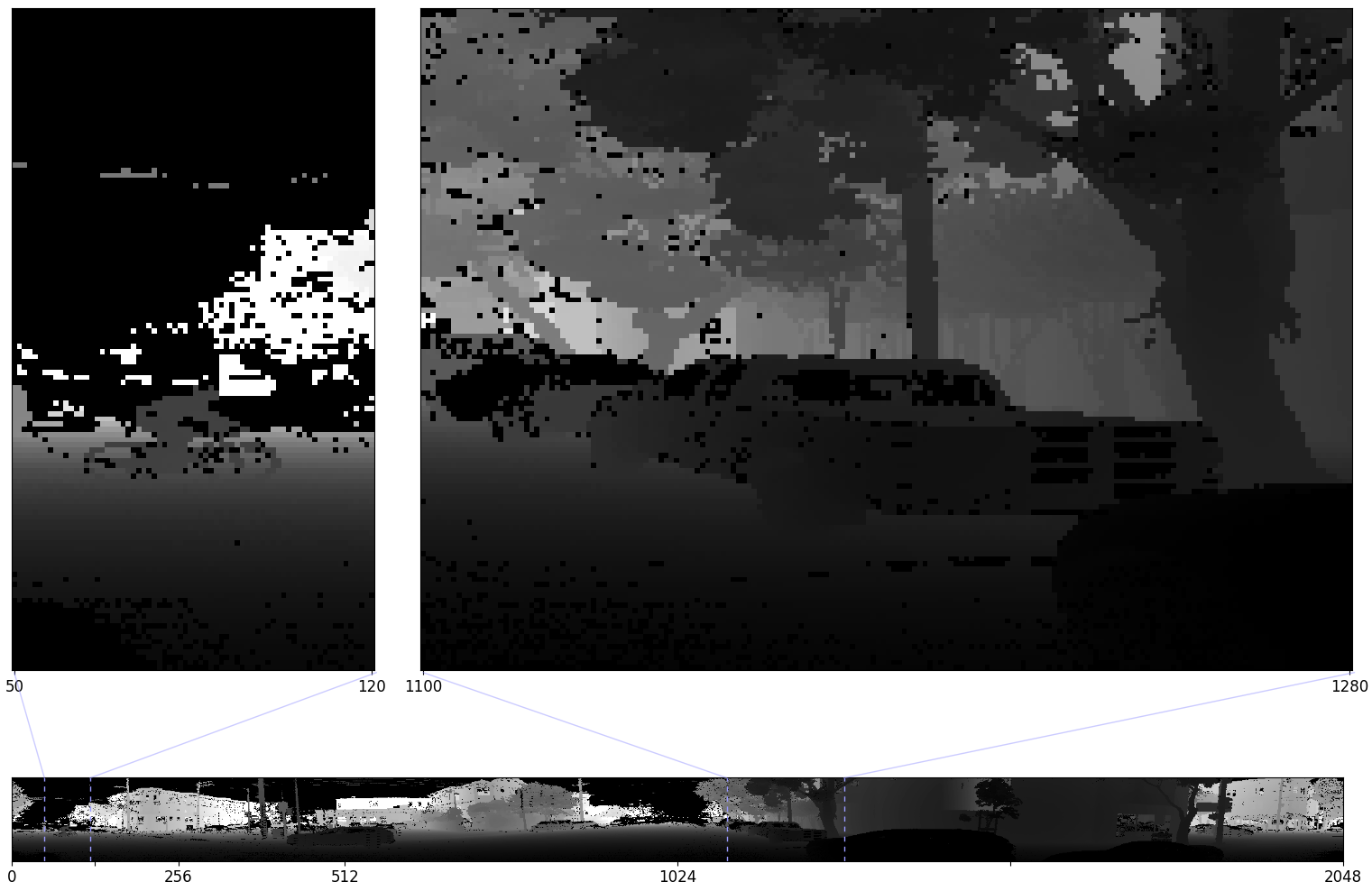
图5:解交错后的2D深度图像
把交错的图像每一行的像素进行平移,使得到的图像在人眼看起来是自然的,这个过程
称为解交错。图5是图4经过解交错后得到的图像。
解交错处理时图像每一行需要移动多少个像素的距离,记录在pixel_shift_by_row
数组中,可以使用HTTP API获取。
2.2.6 扫描数据帧与雷达数据包的关系
UDP数据报文的长度是有限的,有可能无法携带完整的一帧数据,因此需要用多个UDP
数据包完成一帧数据的传输,每个UDP数据包传输若干个列的数据。每个数据包传输的
列数,典型值为16,记录在columns_per_packet中,可以使用HTTP API获取。
2.2.7 数据包格式
OS-1-64在正常工作时会连续实时地将采集到的回波信息和IMU数据通过UDP数据包的 方式发送到主机。其中,IMU数据包的格式比较简单直观,这里仅介绍雷达回波的 数据包。
雷达数据包的选项有多种,但基本的组织形式都是相似的,这里仅介绍RNG19_RFL8_SIG16_NIR16
选项,其他的选项,可以参考固件用户手册。
RNG19_RFL8_SIG16_NIR16是单回波选项,包含4个通道,分别是:
- RNG: 距离,在每个点的数据中占用19个bit
- RFL: 反射率,8bit
- SIG: 反射强度,16bit
- NIR: 近红外,16bit
数据包格式如图6所示,此处仅介绍与下文代码片段 相关的重点内容,关于数据包各字段的更多信息可参考固件用户手册:
- 开始部分是占用256bit的包头(PACKET HEADER);
- 中间部分是包含若干列的回波信息,每列数据包含了头部(column header block)
和该列所有光束的回波信息数据块(channel data block):
- 头部记录了该列时间戳、编号和状态;
- 回波信息数据块记录了每道光束距离、反射率、反射强度等测量结果, 有多少道光束,就有多少个回波信息数据块,这些数据块是连续存放的。
- 结尾部分是占用256bit的包尾(PACKET FOOTER),包含了64bit的E2E CRC编码。
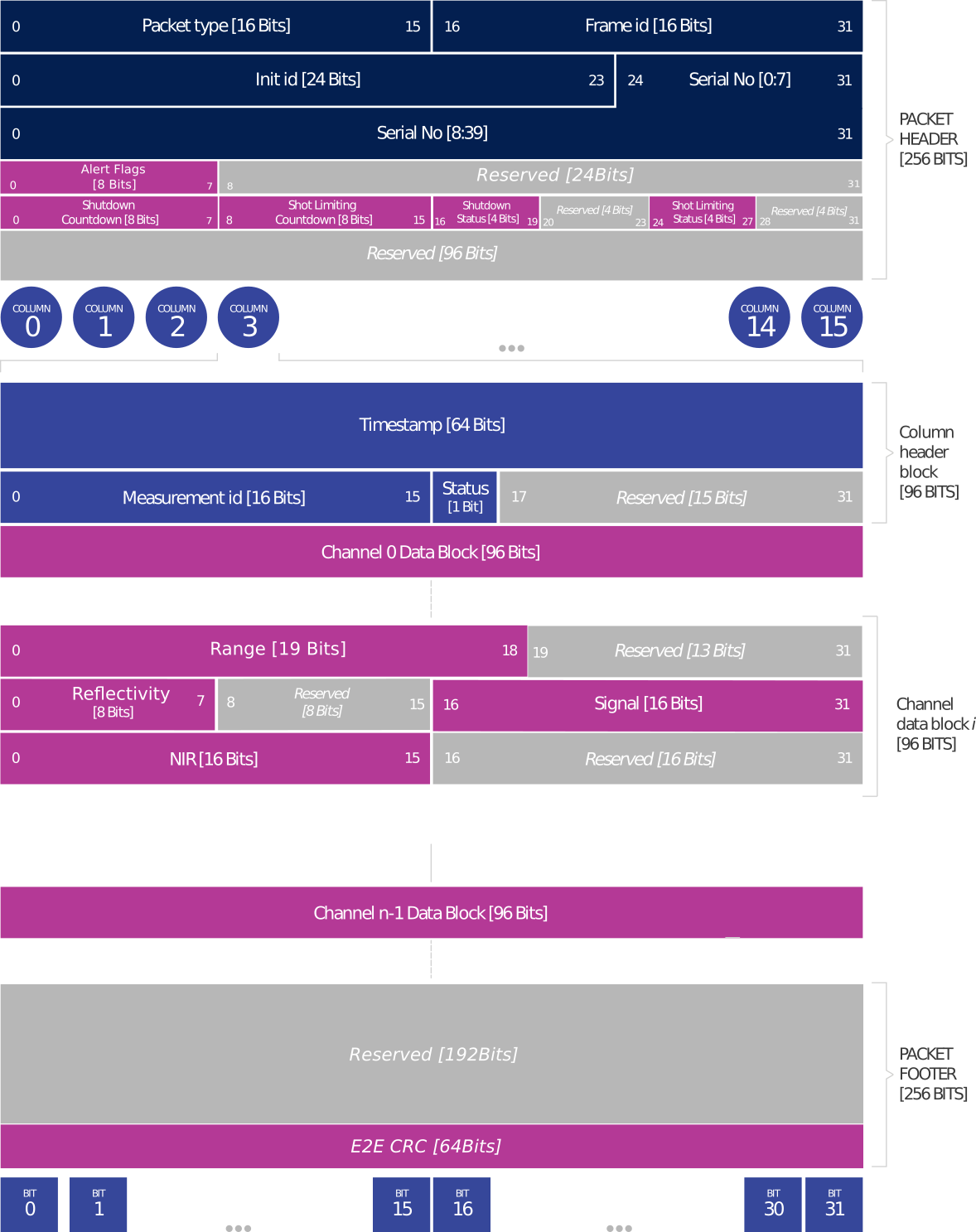
图6:RNG19_RFL8_SIG16_NIR16选项数据包格式
2.3 使用Linux C Socket API处理UDP数据包
以下几个函数封装了UDP通信的基本操作:
// 在指定端口上创建并绑定一个UDP Socket, 用于接收数据
int os_init_udp_client(uint16_t port)
{
char port_str[6];
snprintf(port_str, sizeof(port_str), "%u", port);
struct addrinfo hints;
memset(&hints, 0, sizeof(hints));
hints.ai_family = AF_UNSPEC;
hints.ai_socktype = SOCK_DGRAM;
hints.ai_flags = AI_PASSIVE;
struct addrinfo *servinfo;
int rv = getaddrinfo(NULL, port_str, &hints, &servinfo);
if(rv){
fprintf(stderr, "getaddrinfo: %s\n", gai_strerror(rv));
return -1;
}
int sockfd;
struct addrinfo *p;
for(p = servinfo; p != NULL; p = p->ai_next){
if((sockfd = socket(p->ai_family, p->ai_socktype, p->ai_protocol)) == -1){
continue;
}
if(bind(sockfd, p->ai_addr, p->ai_addrlen) == -1){
continue;
}
break;
}
if(p == NULL){
fprintf(stderr, "fail to create and bind socket.\n");
return -1;
}
freeaddrinfo(servinfo);
return sockfd;
}
// 关闭创建的Socket, 释放资源
void os_close_udp_client(int sockfd)
{
close(sockfd);
}
// 从UDP Socket中接收一个数据包
ssize_t os_udp_client_recv(int sockfd, void *buf, size_t len)
{
return recvfrom(sockfd, buf, len, 0, NULL, NULL);
}
2.4 读取IMU数据
IMU数据包格式较简单直观,可以从读取IMU数据开始,对上一节 给出的UDP通信接口函数进行验证。
2.4.1 数据结构
IMU UDP包长固定为48字节,记录了时间戳和与各轴对应的加速度和角速度 数据,数据组织形式可用以下的结构体表示:
typedef struct imu_packet_t{
uint64_t sys_ts;
uint64_t accel_ts;
uint64_t gyro_ts;
float la_x;
float la_y;
float la_z;
float av_x;
float av_y;
float av_z;
} imu_packet_t;
2.4.2 读取数据包函数
os_status_t os_udp_client_get_imu_packet(int sockfd, imu_packet_t *imu_packet)
{
uint8_t buf[48]; // IMU UDP数据包长固定为48字节
// 读取UDP数据,并把数据拷贝到IMU数据缓冲中
if(os_udp_client_recv(sockfd, (void *)buf, sizeof(buf))){
memcpy((void *)imu_packet, (void *)buf, 8);
memcpy((void *)imu_packet + 8, (void *)buf + 8, 8);
memcpy((void *)imu_packet + 16, (void *)buf + 16, 8);
memcpy((void *)imu_packet + 24, (void *)buf + 24, 4);
memcpy((void *)imu_packet + 28, (void *)buf + 28, 4);
memcpy((void *)imu_packet + 32, (void *)buf + 32, 4);
memcpy((void *)imu_packet + 36, (void *)buf + 36, 4);
memcpy((void *)imu_packet + 40, (void *)buf + 40, 4);
memcpy((void *)imu_packet + 44, (void *)buf + 44, 4);
return OS_SUCCESS;
}
return OS_FAIL;
}
2.4.3 测试与验证
编写了如下函数,连续读取100个IMU数据包,对以上读取IMU数据包的 函数进行简单验证:
int read_imu_data()
{
uint16_t port = 7503; // IMU UDP数据包接收端口
imu_packet_t p = {0};
int count = 100;
int sockfd = os_init_udp_client(port);
if(sockfd == -1){
perror("os_init_udp_client\n");
return EXIT_FAILURE;
}
while(count--){
if(os_udp_client_get_imu_packet(sockfd, &p) != OS_SUCCESS){
os_close_udp_client(sockfd);
return EXIT_FAILURE;
} else{
printf("%f %f %f %f %f %f\n", p.la_x, p.la_y, p.la_z,
p.av_x, p.av_y, p.av_z);
}
}
os_close_udp_client(sockfd);
return EXIT_SUCCESS;
}
以上测试函数的执行结果(部分):
...
0.014648 -0.024170 0.995605 0.946045 1.136780 -0.343323
0.008789 -0.032471 1.019775 1.243591 1.068115 -0.770569
0.021729 -0.026123 0.992676 0.579834 0.137329 0.137329
-0.005371 -0.035156 1.007324 0.564575 0.450134 -0.091553
0.016113 -0.012207 0.993164 1.274109 0.740051 -0.289917
-0.002930 -0.035400 1.017334 0.457764 0.434875 -0.381470
-0.018555 -0.015137 0.989990 1.213074 0.953674 -0.564575
0.022705 -0.026367 1.006592 0.808716 0.572205 0.083923
-0.004639 -0.031982 1.018799 0.808716 0.610352 -0.236511
0.000732 -0.033936 1.006836 1.106262 0.434875 -0.434875
0.003418 -0.026611 0.986572 0.366211 0.503540 -0.091553
0.008789 -0.013428 1.023193 0.633240 0.320435 -0.267029
...
2.5 读取和解析雷达回波数据
2.5.1 数据结构
// 回波信息数据块头部
typedef struct column_header_t{
uint64_t timestamp;
uint32_t measurement_id : 16;
uint32_t status : 1;
uint32_t : 15;
} column_header_t;
// 回波信息数据块的数据部分
// 选项为`RNG19_RFL8_SIG16_NIR16`
typedef struct channel_data_sr{
uint32_t range : 19;
uint32_t : 13;
uint32_t reflectivity : 8;
uint32_t : 8;
uint32_t signal : 16;
uint32_t nir : 16;
uint32_t : 16;
} channel_data_sr;
// 一个列的回波信息数据,包含了头和数据块部分,
// 数据块连续存放该列所有光束的回波信息数据
typedef struct column_data_t{
column_header_t column_header_block;
void *channel_data_block;
} column_data_t;
// 带有若干列回波信息的UDP数据包
typedef struct lidar_packet_t{
// 包头
lidar_packet_header_t packet_header;
// 连续存放列回波信息
column_data_t *column_data;
// 包尾
lidar_packet_footer_t packet_footer;
} lidar_packet_t;
// 记录与雷达型号相关的参数和选项,用于
// 读取和解析数据包时参考
typedef struct sensor_info_t{
// 一个UDP包传输的列数
size_t columns_per_packet;
// 每列点数,也是光束的数量
size_t pixels_per_column;
// 扫描一帧包含的列数
size_t columns_per_frame;
// 数据包选项
udp_profile_lidar_t udp_profile_lidar;
// 光源处于0°时到雷达坐标系原点的变换矩阵
double beam_to_lidar_transform[4][4];
// 所有光束的俯仰角
double *beam_altitude_angles;
// 所有光束的旋转角
double *beam_azimuth_angles;
} sensor_info_t;
// 扫描的一帧数据
typedef struct lidar_scan_t{
size_t w; // 宽(列数)
size_t h; // 高(行数)
uint16_t frame_id; // 帧ID
uint64_t *timestamp; // 时间戳
uint16_t *measurement_id; // 所有列的编号
uint32_t *status; // 所有列的有效状态
// 以下是距离、反射率等通道数据
uint32_t *rng;
uint8_t *ref;
uint16_t *sig;
uint16_t *nir;
uint32_t *rng2;
uint8_t *ref2;
uint16_t *sig2;
} lidar_scan_t;
// xyz坐标
typedef struct xyz_t{
double x;
double y;
double z;
} xyz_t;
2.5.2 函数说明
1. 读取UDP数据包
// 读取数据包
os_status_t os_udp_client_get_lidar_packet(int sockfd, lidar_packet_t *lidar_packet)
{
// 初始化临时缓冲
uint8_t buf[LIDAR_PACKET_BUFFER_SIZE];
size_t len_per_pixel;
// 不同的数据包配置,回波信息占用的字节数不同
if(sensor_info.udp_profile_lidar == RNG19_RFL8_SIG16_NIR16){
len_per_pixel = sizeof(channel_data_sr);
} else if(sensor_info.udp_profile_lidar == RNG15_RFL8_NIR8){
len_per_pixel = sizeof(channel_data_ld);
} else if(sensor_info.udp_profile_lidar == RNG19_RFL8_SIG16_NIR16_DUAL){
len_per_pixel = sizeof(channel_data_dr);
}
// 根据数据包格式,计算数据包占用字节数
size_t header_len = sizeof(lidar_packet_header_t);
size_t footer_len = sizeof(lidar_packet_footer_t);
size_t column_header_len = sizeof(column_header_t);
size_t column_data_len = column_header_len + len_per_pixel *
sensor_info.pixels_per_column;
size_t total_column_data_len = column_data_len * sensor_info.columns_per_packet;
size_t header_offset = 0;
size_t column_data_offset = header_len;
size_t footer_offset = column_data_offset + total_column_data_len;
size_t packet_len = header_len + footer_len + total_column_data_len;
// 读取UDP数据
ssize_t len = os_udp_client_recv(sockfd, (void *)buf, sizeof(buf));
if(len){
// 读取到的数据进行CRC校验,并拷贝到提前分配的数据包缓冲中
assert(len == packet_len);
memcpy((void *)&lidar_packet->packet_header, (void *)buf + header_offset, header_len);
memcpy((void *)&lidar_packet->packet_footer, (void *)buf + footer_offset, footer_len);
uint64_t crc = calculate_crc((uint8_t *)buf, len - 8);
if(crc != lidar_packet->packet_footer.e2e_crc)
return OS_FAIL;
column_data_t *p = lidar_packet->column_data;
for(size_t i = 0; i < sensor_info.columns_per_packet; i++){
memcpy((void *)&(p[i].column_header_block),
(void *)buf + column_data_offset + column_data_len * i,
column_header_len);
memcpy(p[i].channel_data_block,
(void *)buf + column_data_offset + column_data_len * i + column_header_len,
column_data_len - column_header_len);
}
return OS_SUCCESS;
}
return OS_FAIL;
}
2. 获取扫描的一帧数据
// 解析读取到的数据包,提取数据写入提前分配用于存储
// 扫描的一帧数据的缓冲区
void os_batch_packet_to_scan(lidar_packet_t *packet, lidar_scan_t *scan)
{
size_t offset_s;
void *p;
channel_data_sr data_sr;
for(size_t i = 0; i < sensor_info.columns_per_packet; i++){
// 每次处理一列数据,
// 如果该列的数据有效,依据该列的measurement_id
// 将该列的回波信息数据提取到合适的位置
uint32_t m_id = packet->column_data[i].column_header_block.measurement_id;
uint64_t ts = packet->column_data[i].column_header_block.timestamp;
uint32_t status = packet->column_data[i].column_header_block.status;
if(!status) continue;
scan->status[m_id] = status;
scan->measurement_id[m_id] = m_id;
scan->timestamp[m_id] = ts;
p = packet->column_data[i].channel_data_block;
for(size_t j = 0; j < sensor_info.pixels_per_column; j++){
offset_s = scan->w * j + m_id;
if(sensor_info.udp_profile_lidar == RNG19_RFL8_SIG16_NIR16){
data_sr = ((channel_data_sr *)p)[j];
*(scan->rng + offset_s) = data_sr.range;
*(scan->ref + offset_s) = data_sr.reflectivity;
*(scan->sig + offset_s) = data_sr.signal;
*(scan->nir + offset_s) = data_sr.nir;
} else if(sensor_info.udp_profile_lidar == RNG15_RFL8_NIR8){
// ...
} else if(sensor_info.udp_profile_lidar == RNG19_RFL8_SIG16_NIR16_DUAL){
// ...
}
}
}
}
// 获取扫描的一帧数据
os_status_t os_udp_client_get_lidar_scan(int sockfd, lidar_scan_t *scan)
{
// 读取第一个数据包
lidar_packet_t *packet = os_alloc_lidar_packet();
if(!packet) return OS_FAIL;
if(os_udp_client_get_lidar_packet(sockfd, packet) == OS_FAIL){
os_delete_lidar_packet(packet);
return OS_FAIL;
}
os_batch_packet_to_scan(packet, scan);
scan->frame_id = packet->packet_header.frame_id;
uint32_t m_id = packet->column_data[0].column_header_block.measurement_id;
// 连续读取数据包,把数据包拼成一帧数据
while(1){
if(os_udp_client_get_lidar_packet(sockfd, packet) == OS_FAIL){
os_delete_lidar_packet(packet);
return OS_FAIL;
}
if(packet->column_data[0].column_header_block.measurement_id == m_id){
os_delete_lidar_packet(packet);
break;
}
os_batch_packet_to_scan(packet, scan);
}
return OS_SUCCESS;
}
// 以上获取扫描的一帧数据,存放距离、反射率等数据的缓冲区
// 均可视为按行优先存放元素的二维数组,若按行和列将元素
// 与2D图像的像素一一对应,得到的图像是交错的;
// 该函数用于解交错
void os_destagger(void *buf, void *buf_destaggered,
int *pixel_shift_by_row, size_t buf_len, size_t width, size_t height)
{
void *p = buf;
void *p2 = buf_destaggered;
ssize_t shift;
size_t element_size = buf_len / (width * height);
size_t byte_per_column = width * element_size;
for(size_t i = 0; i < height; i++){
shift = pixel_shift_by_row[i] * element_size;
if(shift <= 0){
shift = -shift;
memcpy(p2, p + shift, byte_per_column - shift);
memcpy(p2 + byte_per_column - shift, p, shift);
} else{
memcpy(p2, p + byte_per_column - shift, shift);
memcpy(p2 + shift, p, byte_per_column - shift);
}
p += width * element_size;
p2 += width * element_size;
}
}
3. 获取3D点云的xyz坐标
// 读取一帧扫描的回波信息数据中包含了距离信息,
// 根据固件用户手册中的计算方法计算xyz坐标
xyz_t* os_cartesian(lidar_scan_t *scan, size_t *count)
{
xyz_t *xyz = (xyz_t *)malloc(scan->w * scan->h * sizeof(xyz_t));
if(!xyz) return NULL;
size_t offset_s;
double rng2; // r': range_to_beam_origin
double n;
double theta_encoder;
double theta_azimuth;
double phi;
uint32_t m_id;
uint32_t status;
*count = 0;
for(size_t i = 0; i < scan->w; i++){
m_id = scan->measurement_id[i];
status = scan->status[i];
for(size_t j = 0; j < scan->h; j++){
offset_s = scan->w * j + i;
// status或距离为0,该点的数据是无效的
if(!status || !scan->rng[offset_s]){
continue;
}
n = sqrt(pow(sensor_info.beam_to_lidar_transform[0][3], 2.0) +
pow(sensor_info.beam_to_lidar_transform[2][3], 2.0));
rng2 = (double)scan->rng[offset_s] - n;
assert(rng2 >= 0);
theta_encoder = 2 * M_PI * (1.0 - (double)m_id / scan->w);
theta_azimuth = - 2 * M_PI * sensor_info.beam_azimuth_angles[j] / 360;
phi = 2 * M_PI * sensor_info.beam_altitude_angles[j] / 360;
(xyz + *count)->x = rng2 * cos(theta_encoder + theta_azimuth) * cos(phi) +
sensor_info.beam_to_lidar_transform[0][3] * cos(theta_encoder);
(xyz + *count)->y = rng2 * sin(theta_encoder + theta_azimuth) * cos(phi) +
sensor_info.beam_to_lidar_transform[0][3] * sin(theta_encoder);
(xyz + *count)->z = rng2 * sin(phi) +
sensor_info.beam_to_lidar_transform[2][3];
(*count)++;
}
}
xyz_t *temp = realloc(xyz, *count * sizeof(xyz_t));
if(!temp){
free(xyz);
return NULL;
}
return temp;
}
2.5.3 测试与验证
获取扫描的一帧数据之后,可以将其分别输出为2D图像和3D点云 两种形式进行验证。对于深度、反射率等通道数据,可以借助OpenCV 进行伪彩色映射,从而直观地观察不同强度或距离信息在二维图像中的分布。 与此同时,将点云的xyz坐标数据导出为.las格式,再通过CloudCompare 等软件进行三维可视化,可以从空间角度全面检查雷达采集的点云效果。 通过这两种方式结合,不仅能够更直观地理解数据,还便于验证激光雷达 输出的正确性与质量。
以下使用C++和OpenCV编写了一组接口函数用于将扫描结果中的深度、反射率 等通道数据输出为2D图像:
#include <iostream>
#include <opencv2/opencv.hpp>
template<typename T>
void display_image(T *buf, size_t width, size_t height)
{
cv::Mat img_temp(height, width, CV_32SC1);
T (*p)[width] = reinterpret_cast<T (*)[width]>(buf);
for(size_t i = 0; i < height; i++){
for(size_t j = 0; j < width; j++){
img_temp.at<int>(i, j) = p[i][j];
}
}
cv::Mat img_0_255;
cv::normalize(img_temp, img_0_255, 0, 255, cv::NORM_MINMAX, CV_8UC1);
cv::Mat img_bgr;
cv::applyColorMap(img_0_255, img_bgr, cv::COLORMAP_JET);
cv::imshow("image", img_bgr);
}
extern "C"{
void create_window()
{
cv::namedWindow("image", cv::WINDOW_NORMAL);
}
void destroy_all_windows()
{
cv::destroyAllWindows();
}
int wait_key(int delay)
{
return cv::waitKey(delay);
}
void display_image_8u(uint8_t *buf, size_t width, size_t height)
{
display_image(buf, width, height);
}
void display_image_16u(uint16_t *buf, size_t width, size_t height)
{
display_image(buf, width, height);
}
void display_image_32u(uint32_t *buf, size_t width, size_t height)
{
display_image(buf, width, height);
}
}
PDAL是一个开源的点云数据处理库,专门用来 读、写、转换、处理3D点云数据。 以下使用PDAL C++ API将xyz坐标导出为.las格式的文件:
#include <fstream>
#include <iostream>
#include <pdal/PointView.hpp>
#include <pdal/PointTable.hpp>
#include <pdal/Dimension.hpp>
#include <pdal/Options.hpp>
#include <pdal/StageFactory.hpp>
#include <pdal/io/BufferReader.hpp>
extern "C"{
void write_point_cloud(xyz_t *xyz, size_t len)
{
using namespace pdal;
PointTable table;
table.layout()->registerDim(Dimension::Id::X);
table.layout()->registerDim(Dimension::Id::Y);
table.layout()->registerDim(Dimension::Id::Z);
PointViewPtr view(new PointView(table));
for(size_t i = 0; i < len; i++){
PointId id = view->size();
view->setField(Dimension::Id::X, id, xyz[i].x);
view->setField(Dimension::Id::Y, id, xyz[i].y);
view->setField(Dimension::Id::Z, id, xyz[i].z);
}
BufferReader reader;
reader.addView(view);
StageFactory factory;
Stage *writer = factory.createStage("writers.las");
Options opts;
opts.add("filename", "output.las");
writer->setInput(reader);
writer->setOptions(opts);
writer->prepare(table);
writer->execute(table);
}
}
以下的测试例程读取一帧数据,将距离数据输出为2D深度图像,xyz 坐标数据导出为.las文件:
// 光束的俯仰角
static double beam_altitude_angles[] = {
0.12, -0.23, -0.6, -0.96, -1.29, -1.64, -2.0, -2.35,
-2.69, -3.05, -3.4, -3.74, -4.09, -4.45, -4.8, -5.16,
-5.49, -5.84, -6.19, -6.55, -6.88, -7.23, -7.57, -7.93,
-8.28, -8.61, -8.96, -9.29, -9.64, -9.98, -10.32, -10.66,
-11.0, -11.33, -11.68, -12.02, -12.35, -12.68, -13.03, -13.36,
-13.7, -14.02, -14.34, -14.68, -15.02, -15.33, -15.65, -15.96,
-16.31, -16.63, -16.95, -17.26, -17.6, -17.9, -18.23, -18.53,
-18.87, -19.17, -19.47, -19.76, -20.12, -20.41, -20.69, -20.99
};
// 光束的旋转角
static double beam_azimuth_angles[] = {
4.21, 1.39, -1.43, -4.22, 4.2, 1.39, -1.42, -4.2,
4.21, 1.39, -1.42, -4.2, 4.21, 1.4, -1.41, -4.21,
4.21, 1.4, -1.41, -4.21, 4.21, 1.4, -1.39, -4.2,
4.2, 1.4, -1.4, -4.18, 4.22, 1.41, -1.4, -4.18,
4.22, 1.43, -1.39, -4.19, 4.23, 1.42, -1.39, -4.19,
4.23, 1.43, -1.38, -4.19, 4.23, 1.43, -1.37, -4.16,
4.24, 1.44, -1.38, -4.16, 4.25, 1.44, -1.37, -4.16,
4.24, 1.45, -1.37, -4.15, 4.25, 1.45, -1.36, -4.15
};
// 图像每一行的像素偏移
static int pixel_shift_by_row[] = {
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12,
12, 4, -4, -12, 12, 4, -4, -12
};
// 用于初始化sensor_info全局变量
static sensor_info_t info = {
16, // 每个数据包包含的扫描列数
64, // 光束数
1024 // 一帧数据扫描列数
RNG19_RFL8_SIG16_NIR16, // 数据包选项
// 光源处于0°时到雷达坐标系原点的变换矩阵
{1.0, 0.0, 0.0, 15.806,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0},
// 光束的俯仰角和旋转角
beam_altitude_angles,
beam_azimuth_angles
};
int get_scan_test()
{
uint16_t port = 7502; // 数据包接收端口
int sockfd = os_init_udp_client(port);
if(sockfd == -1){
perror("os_init_udp_client\n");
return EXIT_FAILURE;
}
os_set_sensor_info(&info);
// 分配和初始化用于存放扫描的一帧数据的空间
lidar_scan_t *scan = os_alloc_lidar_scan();
if(!scan){
perror("os_alloc_lidar_scan\n");
return EXIT_FAILURE;
}
// 读取一帧数据
if(os_udp_client_get_lidar_scan(sockfd, scan) == OS_FAIL){
perror("os_udp_client_get_lidar_scan\n");
os_delete_lidar_scan(scan);
return EXIT_FAILURE;
}
// 解交错
uint32_t rng_destaggered[1024 * 64];
os_destagger((void *)scan->rng,
(void *)rng_destaggered,
pixel_shift_by_row,
1024 * 64 * 4,
1024, 64);
// 显示2D图像
create_window();
display_image_32u(rng_destaggered, 1024, 64);
wait_key(0);
destroy_all_windows();
size_t count;
// 从扫描的一帧数据获取xyz坐标
xyz_t *xyz = os_cartesian(scan, &count);
// xyz坐标导出为.las文件
if(xyz){
write_point_cloud(xyz, count);
free(xyz);
}
os_delete_lidar_scan(scan);
return EXIT_SUCCESS;
}

图7:测试例程输出的2D深度图像
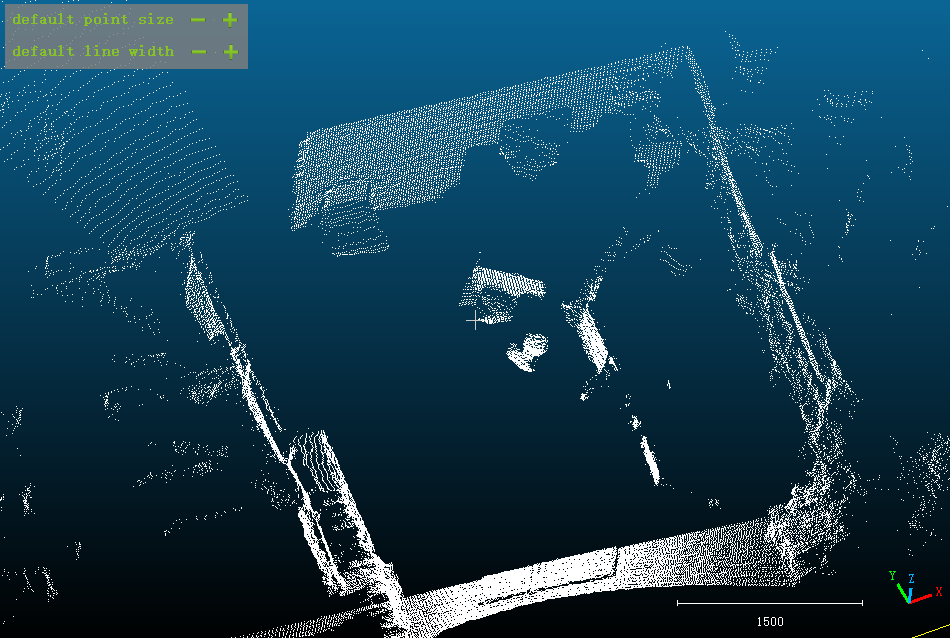
图8:在CloudCompare中打开测试例程输出的.las文件